对Paxos算法的理解
对Paxos算法的理解
前言
当我去了解Raft算法时,大多数人都说Raft算法很简单,而且容易实现。可我去实现时,觉得还是有点难(原谅我实力有限),特别是选举限制、日志复制那些细节令我感到困惑。于是我又去看了看Paxos算法,我惊讶于它阅读起来的简单,正确性证明描述的简洁。可它还是让我有些困惑,我一直在想究竟是什么令我困惑,我想了很久,大概就是那个古老的话题—时间。有时我们必须站在每个节点的立场出发去思考过去、现在、将来,有时我们又需要一个上帝视角去思考问题。后来,我慢慢理解了Paxos算法描述的一个图像,也理解了为什么Paxos算法要有那些提议者、接收者的规定。当我再去看Raft算法时,我也渐渐明白了它的复杂性在于它将状态机之间的信息和Paxos算法的信息混合处理了,它将多次决议的多轮提案混合处理了,我甚至认为Raft其实还可以更简单点的。
安全性
存在N个进程,它们之间可以相互通信,但可能存在信息延迟或丢失的情况。现在有多个或至少一个进程提出一个请求, 请求其它进程把它提出的某个值V 写入进程自己中(持久化),提出请求的进程称作提议者(Proposer), Proposer提出的请求称作提案(Proposal),提案的内容是V, 收到请求的进程称作接收者(Acceptor), acceptor如果同意proposer的提案,那么acceptor会把提案的内容V持久化并回复proposer。如果proposer收到超过一半的acceptor的同意,可以认为这个提案被选定,之后proposer会把这个提案的内容V告诉一个或多个外部的进程。这些外部的进程称作学习者(Learner),learner一旦收到消息,那么就认为内部N个进程中已经有超过一半将某个提案的V持久化成功,或者说达成了某种共识。
现在假设proposer1提出提案V1 , 并被选定,那么learner收到了V1。 可是如果acceptor只接受一次提案,那么N个进程可能无法达成共识,因此acceptor只能接受多个提案,并且只能最新的提案值V是有效的。之后可能又有proposer2提出提案V2,此时如果超过50%acceptor根据提案接受规则接受了V2, 那么learner这时收到了V2。安全性就是要求必须V2=V1, 也就是说一旦一个提案V1被选定了,后续被选定的提案Vn必须与V1是相同的。我们可以把对多轮提案投票的整个过程称作一次决议。
acceptor是无法知道它当前接受的提案是否被选定,因此所有acceptor必须根据相同提案接受规则来决定收到的提案, acceptor也可以作为proposer 。Paxos算法就是一种提案提出和接受规则,来确保一次决议过程是安全的。
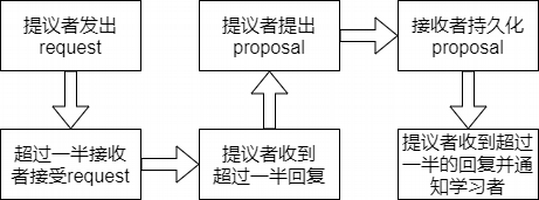
算法如下:
-
阶段1—提议者:取一个比自己所知的提案号大的提案号,把它发送给acceptor, 称作request阶段
-
阶段1—接收者:acceptor如果收到request阶段的一个提案号,如果它比自己所知的提案号大, 那么就回复该proposer,表示同意,该回复还要包括自己最新的持久化的值及它对应的提案号
-
阶段2—提议者: proposer如果收到超过一半的acceptor的回复,那么proposer先确定提案值
V, 这个值是回复中的提案号最大的那个值(可以包括自己持久化的值),如果没有,提议者可以任意设定。之后它把提案号及值V发送给所有进程, 称作proposing 阶段 -
阶段2—接收者 : acceptor如果收到proposer proposing阶段的请求,如果提案号大于等于它所知道的提案号并且尚未持久化,那么就持久化,持久化完成后回复该proposer;
-
阶段3—提议者:proposer如果收到超过一半的持久化成功的回复,那么就把提案值
V告诉learner,learner可以认为达成共识,之后learner收到的提案值V都确定是一致的。
说明:比自己所知的提案号大的提案号
一个进程无论作为proposer或者acceptor,它所知道的提案号有两个,一个是最新的持久化的提案号,一个是它最新收到的request阶段的提案号
推导过程(我的理解)
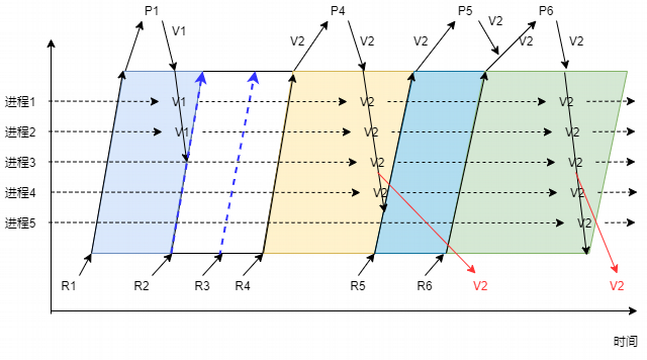
R{i}表示提案号i, request开始,箭头表示消息的传递,P{i}表示编号为i的提案形成,V表示持久化的值,
一个完整的提案过程:
按上图举例说明:
R4表示request开始,- 之后传递到进程中,之后有超过50%的进程同意,
- 提议者收到消息
- 形成提案
P4,值为V2 - 接收者收到proposing,持久化成功
- 提议者收到超过一半的回复,通知学习者
然而,一个提案可能在任意阶段被打断,我们要做的就是从每个进程的角度出发,确保开启一个新的提案,直到获知提案已经完成。
- Paxos算法首先假定了即使提案被打断,也要确保任何一个进程所经历的有效提案的时间顺序都是一致的,形成如图中的各种颜色的顺序,不可能出现部分进程P5先于P4发生,而其它进程P4先于P5的情况。因此无论提出提案还是接收提案都对提案号的大小有要求。
- 然后Paxos的核心在于,P4如果已经被选定(
V2持久化成功),那么P5要提出的值也必须是V2。如何要做到这点呢?其实比较简单,因为P4总是在P5之前发生,P5只要获取到P4持久化值的信息就可以了,P5可以在request阶段收集这个值V2,而V2这个值已经存在超过一半的acceptor中,所以P5收集到的持久化值中一定有V2,根据最新的提案号就可以找到它了。那有没有可能最新的提案号的的值不是V2呢?其实是不可能的,我们看P4的结束阶段,不等于V2的那些持久化值都是发生在P2之前,也就是说它们的提案号都小于P2。 - Paxos算法就像一个递归,P4是最初完成的提案,P5是下一轮有效提案,上面我们证明了如果P4持久化了
V,那么P5一定会提出V(无论它是否有持久化过程),之后的提案可以如此递归下去。 - 可是还有从混乱到P4的过程,而且并不是所有进程都知道一个提案是否完成,也就说无论哪个过程,各个进程都是在执行相同的规则。当然,根据P4到P5的过程的规则,从混乱到P4的过程同样可以发生。因此,整个决议过程:混乱—>P4—>P5—>....是可以真实发生的。
- Paxos算法何时结束呢?一个进程只有当它确定它持久化的值被选定,它才不会继续发起提案。因此,要么所有的进程都成功的发起了一次提案来判断它自己的结束,要么就是别的进程通知它。
Paxos算法和复制状态机
Paxos算法中要持久化的值V是一个比较抽象的概念。在复制状态机中,如果我们把V对应成一次操作,持久化即意味着对状态机进行某个操作。那么尽管根据Paxos算法可以对某个操作达成共识,但是如果一开始复制状态机不一致,最终复制状态机还是不一致。
在Paxos中,一次决议过程会有多个提案,进程可能对不同的值进行了多次持久化,可是那些值之间可能会有因果关系。 比如如果V对应一次操作,前后是有影响的。
最后还有一个问题,那就是一次决议过程何时结束。结束就是最后一个节点知道了它持久化的值已经被选定了,不然它就会一直发起提案。而Raft算法的复杂性就来源于一次决议可能尚未结束,它就开起了下一轮决议,所以它一次Append过程要处理多个值,包括状态机的更新,多个不确定是否被选定的值。
因此,我认为把共识和状态机分开处理更容易一些:
- 当状态机不是最新时,不可参加Paxos共识算法的任何过程,而是尽可能的从其它节点更新自己的状态机。
- 当状态机一次决议过程未完成时,必须先完成这次提案。比如一个leader收到一个写入操作,在复制给其它节点时出现故障,那么在它恢复后,先处理这次决议过程,对收到的下一个写入操作暂停处理。对于follower 而言,在它确定自己持久化的值被是否选定之前,不参与新一轮的决议过程。